Während Autos auf Autobahnen bereits relativ sicher autonom fahren können, stellt der Stadtverkehr für sie nach wie vor eine große Herausforderung dar. Das Projekt "InVerSiv" möchte eine intelligente Verkehrsinfrastruktur aufbauen, um diese Lücke zu schließen.
Die Frage ist nicht ob, sondern lediglich wann das automatisierte Fahren vollends Einzug in unsere Gesellschaft halten wird. Erste Ansätze gibt es bereits seit Jahren: Spurhalteassistenten, Spurwechselassistenzen, Bremsassistenzen und vieles mehr sind heute selbstverständlich. Zuletzt hat der technische Fortschritt weitere wichtige Meilensteine gesetzt und Produkte wie die Fahrzeuge von Tesla und auch Mercedes und BMW möglich gemacht, die in weiten Teilen bereits vollautomatisierte fahren können und den eigentlichen Fahrer zumindest in vielen Situationen faktisch nicht mehr benötigen um den Verkehr zu bewältigen.
Die Zahl der Variablen in Megacities ist riesig
Dabei ist auch für Laien eine Sache auf den ersten Blick erkennbar: Während das Fahren auf der Autobahn bereits in vielen Teilen problemlos funktioniert, stellt vor allem der Verkehr in der Stadt für die Systeme eine enorme Herausforderung dar, der sie zweifelsohne noch nicht gewachsen sind. Zu groß ist dafür die Zahl der Variablen und Faktoren, die in den Megacities auf die Systeme einprasseln und die sie alle richtig interpretieren und umsetzen müssen. Denn jeder noch so kleine Fehler kann fatale Folgen haben.
Im Umkehrschluss bedeutet das: Wer den Stadtverkehr beherrscht, der beherrscht auch den Rest. Und genau dieser Herausforderung stellt sich das Projekt "InVerSiv", das - gefördert unter anderem mit EFRE-Mitteln - eine "intelligente Verkehrsinfrastruktur für sicheres vernetztes Fahren in der Megacity" aufbauen will. Der Ansatz der Forscher sieht vor, dafür auf möglichst viele bereits vorhandene Daten zurückzugreifen und sie heranzuziehen, um das vollautomatisierte Fahren sicherer zu machen.
Je detaillierter die Informationen desto sicherer das Fahren
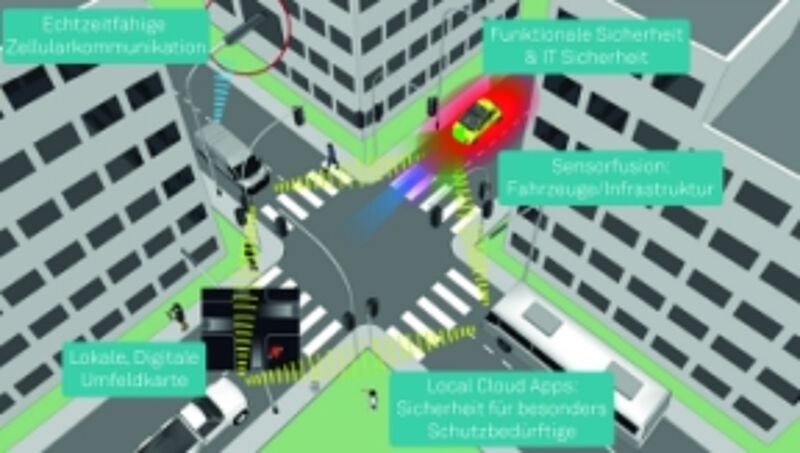
So sollen die Sensoren in den Fahrzeugen mit der Infrastruktur der Straße, die ebenfalls mit Sensoren zur Umfelderkennung ausgestattet ist, vernetzt werden. In Verbindung mit weiteren Informationen aus lokalen und globalen Zentralen (zum Beispiel Übersichtsplänen oder Google Maps, wobei letztere allein von der Qualität und Detailgenauigkeit her noch nicht ausreichen) kann so im Vergleich mit einer Sensorik die nur auf die Daten zurückgreift, die das Fahrzeug selbst gewinnt, ein deutlich umfassenderes Bild der Umgebung beziehungsweise des Umfelds entstehen. Und je genauer das ist, desto besser kann die Technik die Situation einschätzen.
Ampeln die mit Autos kommunizieren, Autos die untereinander Daten austauschen, lokale Cloud-Apps die sich ebenfalls in das System einklinken - all das soll helfen, das fahrerlose Fahren in der City möglichst bald Realität werden zu lassen. Derzeit werden dafür eigens Testfelder in realen Umgebungen eingerichtet. Sie geben auch einen Aufschluss, ob die Erkenntnisse der Forscher sich auf reale Situationen übertragen lassen und sollen sowohl anderen Projekten zugänglich gemacht werden als auch über die Laufzeit des Projekts hinaus verfügbar sein. Am Ende erhoffen sich die Wissenschaftler davon einen nachhaltigen Effekt für die Standortentwicklung.
1.720.304 Euro Gesamtinvestition
davon:
1.320.991 Euro EFRE Fördermittel
399.313 Euro NRW Landesmittel
CommAgility Ltd
adesso AG
Technische Universität Dortmund
Wilhelm Schröder GmbH
SGS-TÜV Saar GmbH
Verbesserung der Innovationsfähigkeit von Unternehmen
01.07.2016 - 30.06.2019